Magnetic coils guide microrobots where cameras can’t
Magnetic coils guide microrobots where cameras can’t📷 Published: Apr 7, 2026 at 18:16 UTC
- ★SMU’s coil system ditches visual tracking
- ★Medical and industrial use cases tested
- ★Hardware limits remain unspoken in demos
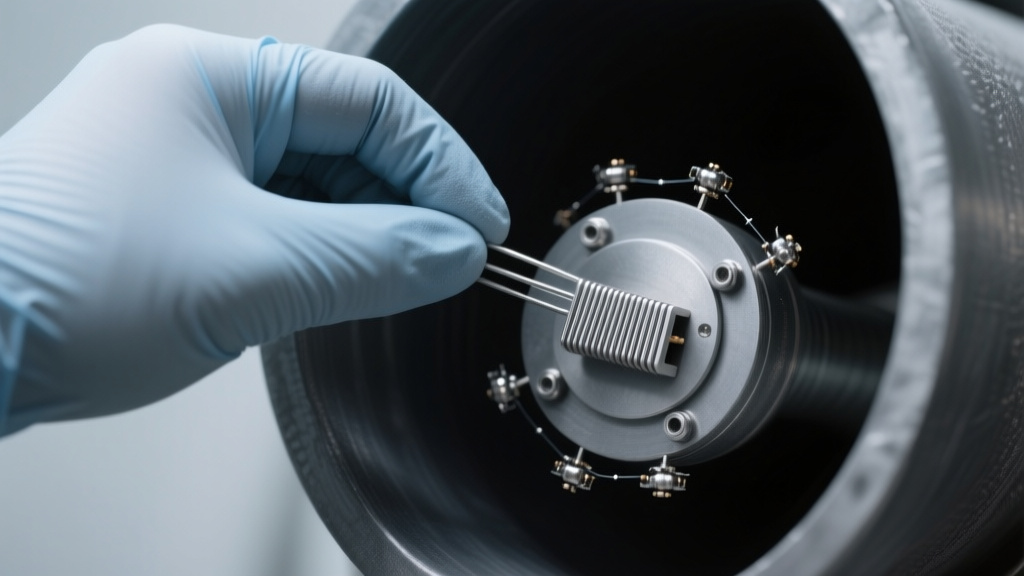
Southern Methodist University researchers have built an electromagnetic coil system that steers microrobots without needing line-of-sight cameras—a first for environments where visibility is zero, like inside the human body or industrial pipelines. The prototype eliminates the reliance on real-time imaging, a long-standing bottleneck for microrobotics in opaque or confined spaces. Unlike most demos that polish choreography under perfect lighting, this system has been tested in settings where cameras simply cannot go. TechXplore reports the breakthrough, but the hardware specifics—coil size, power draw, and precision—remain vague in the promo materials.
The claimed advantage is clear: microrobots could now navigate through blood vessels, inspect machinery internals, or repair pipes without requiring external visual feedback. Early signals suggest potential for minimally invasive surgeries, where microrobots could deliver drugs or perform biopsies in areas inaccessible to cameras. Yet, the leap from lab demo to clinical deployment is rarely as seamless as the video suggests. The coil array itself must be compact enough for portable use, and the power requirements could limit operation time—details that are glossed over in the initial announcement.
Industrial applications, like inspecting heat exchangers or chemical reactors, also stand to benefit. These environments often have strict safety and certification hurdles, and microrobots would need to prove reliability in high-temperature, high-pressure, or corrosive conditions. The current demo does not address whether the system can handle these real-world stresses, or if it’s still confined to controlled lab settings. The marketing language positions this as a ‘significant advancement,’ but the actual engineering challenges—scaling the coil array, ensuring precision in dynamic environments—remain unanswered.
The real deployment barrier: what the demo video won’t show you📷 Published: Apr 7, 2026 at 18:16 UTC
The real deployment barrier: what the demo video won’t show you
The hardware limits are where most microrobot demos fall apart. Battery life, payload capacity, and environmental resilience are rarely discussed in press releases, yet they determine whether a technology moves beyond proof-of-concept. For instance, can these microrobots operate for hours, or just minutes? Can they carry sensors or tools, or are they limited to simple navigation? The SMU team’s work does not clarify these critical constraints, leaving open questions about its practicality for medical or industrial use.
Another unspoken hurdle is swarm scalability. Controlling a single microrobot is one thing; coordinating dozens or hundreds without visual feedback introduces complexity that the current system may not yet handle. The coil system’s ability to manage interference, collisions, or varying magnetic fields in dense environments remains speculative. Without addressing these issues, the system risks being another impressive but impractical lab experiment.
The genuine use cases—medical procedures in opaque tissues or industrial inspections in dark pipes—are compelling, but the demo’s silence on hardware limitations raises red flags. For this technology to transition from research to real-world deployment, the SMU team will need to publish data on coil durability, power efficiency, and precision in dynamic conditions. Until then, the breakthrough remains a promising concept, not a deployable solution.
Stripping away the marketing filter, the core innovation is undeniable: a microrobot that doesn’t need constant visual tracking opens doors to environments cameras can’t reach. But the gap between the demo and real-world application is where the real story lies. The coil system’s success will depend on how well it handles the unglamorous, unfilmed challenges of deployment.
In other words, the demo video is shot in perfect conditions, but the real world doesn’t come with a green screen. The hardest part—making this work outside the lab—is conveniently left out of the highlight reel.