Magnetne zavojnice vode mikrorobote tamo gdje kamera ne može
Magnetne zavojnice upravljaju mikrorobotima bez kamera — radi li to i u tijelu?📷 © Tech&Space
- ★99% točnosti u simulaciji nije kraj priče
- ★Bez kamera, ali i bez jasnog fallbacka
- ★Medicinska i industrijska primjena još traži dokaz
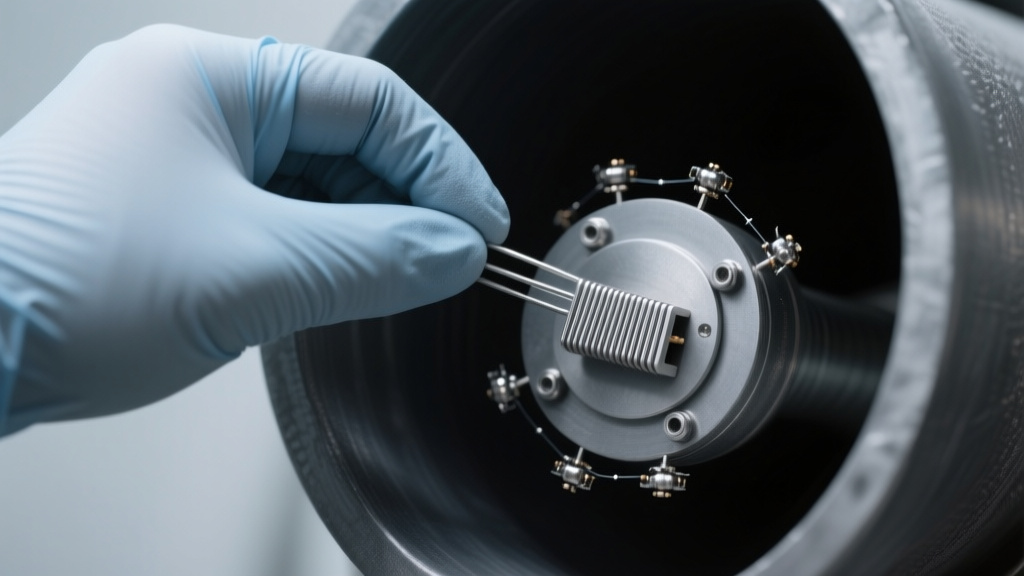
SMU-ovi istraživači nisu samo zamijenili kameru magnetnim poljem, nego su pokušali iz procesa izbaciti i cijeli sloj vizualnog praćenja. Triaksijalni Helmholtzov sustav sa šest zavojnica stvara uniformne magnetske gradijente i tako vodi mikrorobote bez stalnog gledanja u ekran. U simulaciji to izgleda uvjerljivo, ali simulacija nije krvotok, ni industrijska cijev, ni mjesto gdje se gubi signal.
Najveća prednost je očita: kamera može biti spora, skupa ili jednostavno beskorisna kad je prostor neproziran. Zato je ovaj pristup zanimljiv za medicinu i industriju. No isti potez otvara novo pitanje: ako nemaš kameru, kako točno znaš gdje je robot kad nešto pođe po zlu?
Upravo zato je ova priča više o kontroli nego o spektaklu. Mikrorobot bez vizualnog praćenja nije pobjeda sama po sebi; tek je prvi korak prema sustavu koji se možda može koristiti u stvarnom tijelu ili zatvorenoj infrastrukturi.
Kad kamera nestane, fizika preuzima vođenje📷 © Tech&Space
Kad kamera nestane, fizika preuzima vođenje
Pravi problem počinje s energijom i povratnom informacijom. Mikroroboti i dalje trebaju vanjski izvor snage, a bez vizualnog sloja svaka greška postaje teža za dijagnosticiranje. To znači da je sustav koristan samo ondje gdje magnetsko polje može ostati stabilno i gdje se može održavati dovoljno precizna kontrola.
Industrija će možda prva pokazati može li ovakav pristup proći kroz cijevi i uske kanale, ali medicina je pravi cilj. Ako sustav ne može dati robustan način praćenja bez kamera, onda 99 posto iz simulacije ostaje laboratorijska pohvala, a ne proizvodna pobjeda.
Drugim riječima, kamera nije problem koji je nestao. Samo ga je fizika privremeno zamijenila drugim pitanjima.